














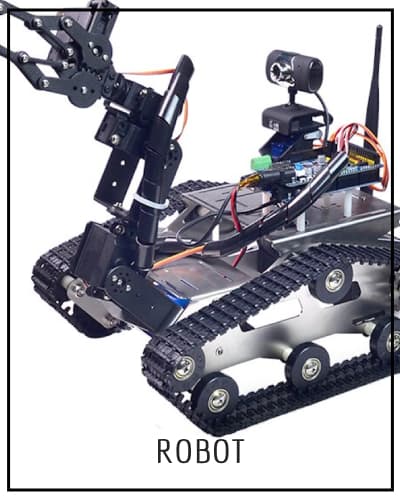












エクスプローラー計画 - ROS LIDARナビゲーションロボットタンク




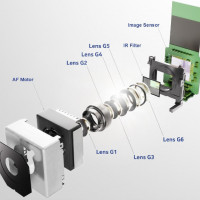
ROSナビゲーションロボットタンクには、720PカメラとLIDARセンサーが搭載されており、ROSフレームワークに基づいて開発されています。ユーザーはWiFiリアルタイム画像によってロボットをリモート制御し、光学レーダーを使用してマップを作成できます。ロボットタンクは、ワンキーマップの作成やナビゲーションなどの機能を提供し、人間とコンピューターのインタラクティブな操作インターフェイスも提供します。
カメラとLIDARセンサーを備えたロボットタンクは、モデリング、ナビゲーション、追跡、障害物回避、およびその他の機能開発に使用できます。高度な開発者に最適なロボットプラットフォームです。
ソフトウェア ダウンロード: |
エクスプローラー計画 - ROS LIDARナビゲーションロボットタンク
|
製品特徴 - Crawler Drive |
Datasheet
|
から始まる ¥56,640
- 配達時間: Preorder
- 製品番号: ROS-LIDAR-Navigation-Robot-Tank