


























Remote Control Mobile Robot Platform

- [リモートコントロールモバイルロボットプラットフォームとは?]
- [Raspberry pi 3 / ROS 2]
- [24VモーターとDCモーター]
- [IADIYのリモートコントロールモバイルロボットプラットフォームの未来]
リモートコントロールモバイルロボットプラットフォーム
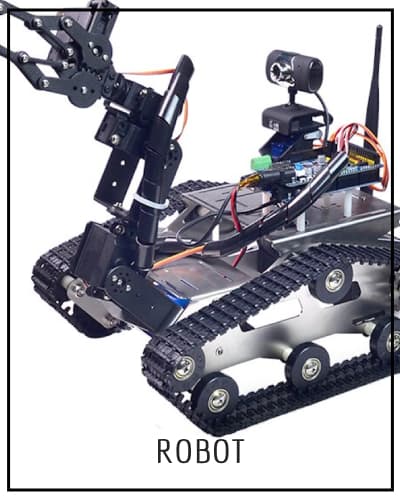
フォトニックモジュールを使用して様々な測定、実験、アプリケーションを行うことができますが、カメラやレーザーモジュールの使用範囲を広げるためには、モバイルプラットフォームが強く推奨されます。ロボットと自動化の時代へと進む中で、モバイルロボットプラットフォームの重要性は過小評価できません。当社のモバイルプラットフォームは、24Vのブラシレスモーターと50 x 25のソールプレートを使用して、より重いモジュールや多数のモジュールを運ぶことができます。24Vモーターには内蔵のドライバーと減速ギアがあり、モバイルプラットフォームはより微細な動きを行うことができます。
Raspberry pi 3 / ROS2
モバイルプラットフォームの実現に向けて、Raspberry Pi 3モデルを選定し、接続したピンに従ってプログラムを設計しました。ROS(ロボットオペレーティングシステム)を使用することで、ノートパソコンでモバイルプラットフォームをリモートコントロールするための様々なライブラリやモジュールにアクセスできます。より複雑またはカスタムのコーディング設計を希望する場合、さらに多くの操作スペースがあります。
24VモーターとDCモーター
この24Vモーターは、通常のDCモーターとはかなり異なる特性を持っています。電源の負極ポートを接地する必要があることがわかりましたが、一度負極ポートが接地されると、PWM機能は逆の動作をします。通常はデューティサイクルが高いほど回転速度が上がりますが、このモーターではデューティサイクルが高くなるほど速度が低くなります。
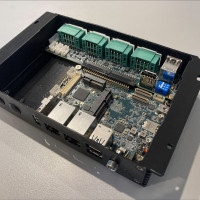
モバイルプラットフォームに搭載されている黒いケースは、モーターの電力を供給するために選定された一時的なバッテリーです。主に電動自転車で使用されるため、DC 36Vを供給できますが、モーターは24Vしか対応していないため、両方のモーターにDC昇圧コンバーターモジュールを挿入しました。また、Raspberry Pi用の一時的なモバイルパワーバンクもプラットフォームに搭載しました。
IADIYのリモートコントロールモバイルロボットプラットフォームの未来
これはロボットモバイルプラットフォームのプロトタイプであるため、ワイヤートレースとカウンターウェイトは設計していません。一部のワイヤーが長すぎることや、プラットフォームに2つの端子ブロックと一時的なブレッドボードが取り付けられていることがわかります。
バッテリーやボードが占めるスペースを現在のレイアウトの20%に削減し、よりコンパクトなモバイルプラットフォームを期待しています。
PCとRaspberry Pi間の通信をROSノードを介して確立し、PC端をマスターノードとしてコマンドを公開します。対照的に、Raspberry Pi端はPC端からのコマンドを受信します。
 Compact Size AI Camera Module")
 Compact Size AI Camera Module")







-300x250h.png "i.MX8MP AI Vision Kit")
-300x250h.jpg "i.MX8MP AI Vision Kit")






























Leave a Comment